RoBimCut零件等离子坡口切割中心集成先进的机器人软硬件一体化能力,满足碳钢板的不同尺寸和厚度规格的直线、弧度、圆度的自动化柔性切割,全过程无需要编程示教和人工干预,一次性完成智能化的加工,有效提高切割效率和产品质量。
01:坡口等离子切割站 |
主要针对小型零件的自动化坡口切割,零件变形量相对较小,采用局部视觉定位的解决方案,配合RoBimCut软件中视觉算法,能有效消除零件尺寸偏差,在机器人自由规划路径算法的加持下,实现高质量的自动化坡口切割。 |
|
02:超长工件机器人坡口切割站 |
主要针对超长6米长度的结构件,采用全局视觉定位与RoBimCut几何算法相结合,能够一次性构建出完整的零件轮廓并消除零件尺寸偏差。优化后的机器人自由规划路径算法,满足各种形式的坡口切割需求。 |
|
性能特点
数据快速对接,参数快速设置
RoBIM软件可直接对接产品CAD图纸和三维数模数据,采用模块化可视中文界面,操作简单,点击选项菜单即可完成一键操作
视觉智能定位纠偏,提质增效
视觉系统对工作台上的工作进行扫描定位,并根据实际位置尺寸自动生成加工程序,全程无需编程与示教,有效提高效率和质量
自动路径规划和仿真模拟
RoBIM软件根据设置好的参数自动进行路径规划,同时对生成的路径进行仿真模拟,软件会以3D的形式对全工艺流程进行展示,方便操作人员 快速核查
自动调用工艺库,满足多样需求
RoBIM软件后台配有坡口切割工艺库,加工程序可根据产品工件厚度自动调用工艺库中工艺参数,适应钢板多尺寸多规格加工要求
客户案例
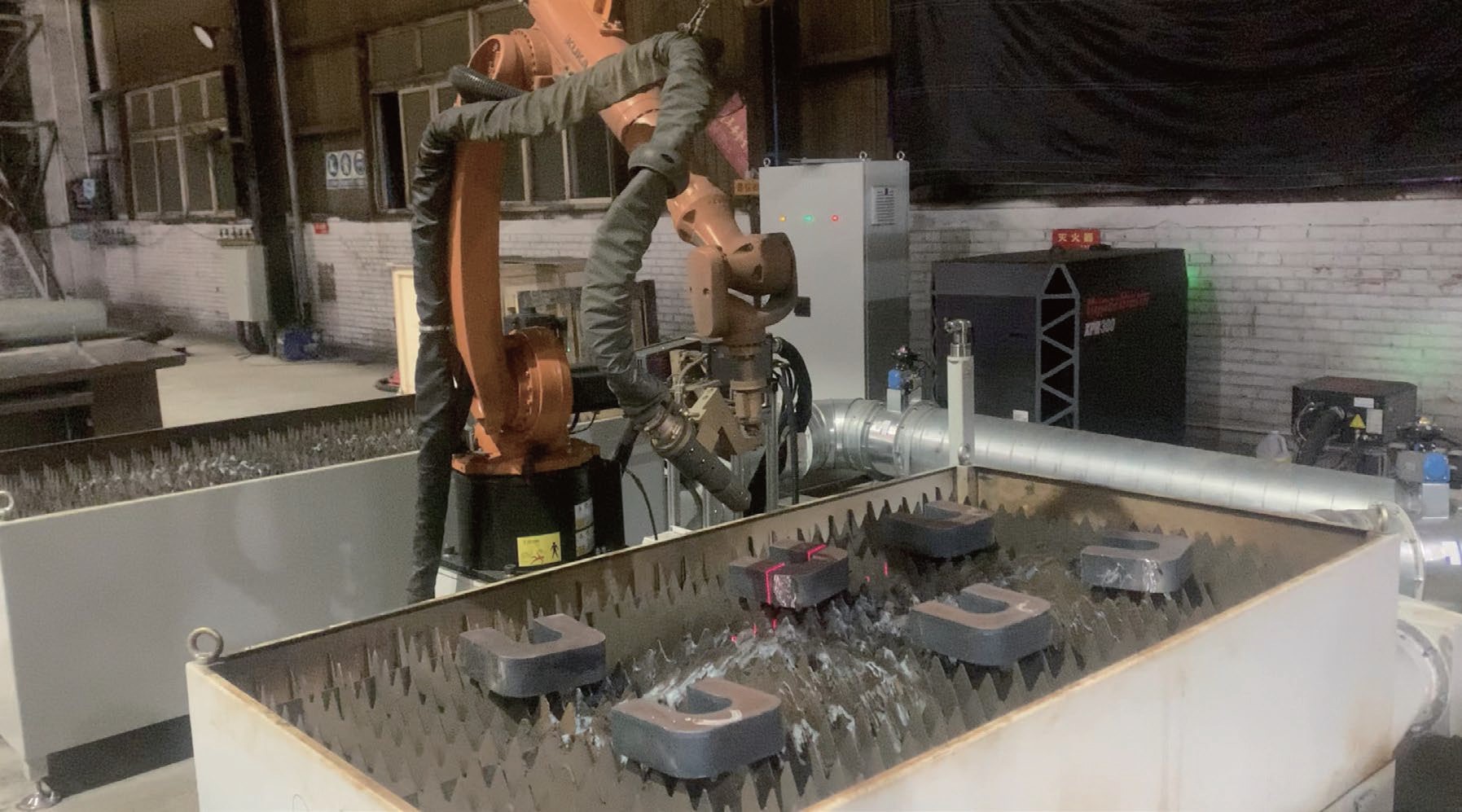
大界为某头部煤机生产制造企业提供中厚板等离子坡口切割机器人解决方案。针对液压支架零件切割场景,大界通过自研工业软件RoBIM,结 合先进的视觉算法,帮助客户解决工件的来料偏差大,工装定位难,人工示教效率低、工艺经验依赖性强等难题。
(国产8米智能超大采高液压支架坡口生产)
行业痛点
来料偏差大
工装定位难
人工示教效率低
工艺经验依赖强
解决方案
针对液压支架零件切割场景,大界通过自研工业软件RoBIM,结合先进的视觉算法,提供地轨机器人、双工位机器人、等离子切割系统、视觉系统、除尘系统等软硬件一体解决方案,帮助客户解决来料偏差大,工装定位难、人工示教效率低、工艺经验依赖强等痛点。
|
|
| 地轨机器人 | 双工位机器人 |
应用优势
01:图纸批量导入,自动匹配工艺参数
在RoBIM中批量导入图纸,自动生成三维模型并匹配坡口参数,简化工艺员在二维软件中对各个工件进行标注的工序,满足集中编辑,直观查 看,统一生产。

02:多工作站构型,匹配不同生产模式
针对液压支架零件的少批量多批次的生产模式,提供双工位切割站,机器人在两个工作站之间交替作业,人员上下料与机器人切割无缝衔接,极大提高 生 产效率。针对超长工件切割,提供定制化案例,可满足规格8-10米的液压支架所涉及的超长工件的加工。

03:利用自研视觉算法,随意放置工件
自研的视觉算法,可定位工件的所处位置及摆放姿态,节省上料插拔限位钉销的时间,工件无需摆正也可自动识别加工。同时视觉算法可精准识别来料的实际尺寸与图纸的偏差,重构加工轮廓,更正机器人切割路径,匹配最优算法,实现最佳切割效果。
04:多工件自动加工,提高生产效率
凭借先进的视觉算法对海量工件轮廓的分析,实现单工作站多工件的同批次或不同批次的自动加工,大幅度减少人工上下料的频次,降低劳动强度,实现降本增效的目的

如您对大届机器人产品或解决方案感兴趣,欢迎扫描下方二维码咨询!