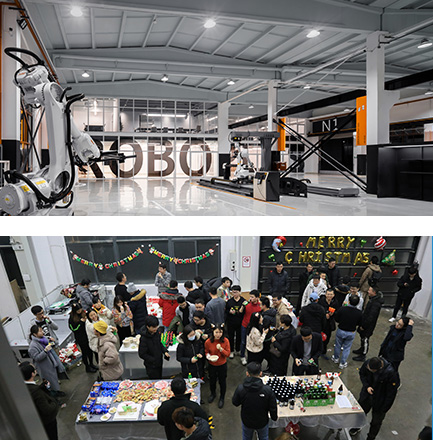
智能建造赛道领跑者,敢于探索机器人核心技术,改变中国建筑产业

内部知识分享机制、业界大佬新秀公开课,不断刺激你的求知欲
开放创新的平台化思维,积极鼓励部门之间的协同与融合

有温度的工作氛围,像家人一样持续关心和关注员工的个人发展

技术创新

终身学习

突破边界

解决问题

工匠精神
无限想象力的新兴行业
年轻有为的硬核同事
具有竞争力的薪资条件
员工快速成长计划
丰富多彩的团建活动
建筑机器人公开课
内部员工分享机制
羡煞旁人的带薪撸猫