去年是大界工业软件出海的第一年,为了在赋能海外工厂产业升级的同时,打造完整的产学研生态圈,今年我们也决定将RobimGH面向全球高校开放,支持老师、学生的研发,也期待能够通过RobimGH搭建全球高校师生创新的桥梁。
RobimGH x Food4Rhino
Food4Rhino作为全球最为著名的Rhino和Grasshopper社区之一,提供了大量的插件下载,也是全球Rhino与Grasshopper的使用者与开发者最常访问的网站之一。在Food4Rhino上,我们上线了RobimGH,免费为全球用户提供自动避障与外部轴自动规划等最新算法功能,我们也期待与全球客户在软件的功能与应用方面开展合作与交流。
如何获RobimGH
方式一:在本公众号后台回复关键词【RobimGH】即可获得软件安装包及使用教程。方式二:登录【Food4Rhino】论坛官网页面下载。
https://www.food4rhino.com/en/app/robimgh-beta
RobimGH是我们自主研发的工业软件RoBIM的起源,来自于核心创始人10年前在学术界,基于几何建模软件Rhino研发的工业机器人的插件,是我们早期对机器人智能技术的探索与尝试,旨在降低机器人的操作门槛,通过直观的图形化界面轻松控制机器人运动、信号指令和力控等各种行为。近年来,RoBIM通过与行业头部客户联合创新,借助物联网、大数据及机器学习技术积累了丰富的工业流程经验,构建了强大的多样化工艺算法库,逐步形成了跨行业的“算法 + 数据 + 流程”的综合能力,并沉淀为RobimGH的知识库,为RobimGH提供大量经过实际生产验证的算法依据与工艺资料,使RobimGH更加通用、智能、自主。基于在建筑制造业积累的深度经验,并结合跨界多学科的创新能力,我们与国内多家高校合作,逐步形成一套面向智能建造新学科的综合人才培养方案,助力院校的学科转型。 目前我们已在浙江大学、华南理工大学、同济大学、西交利物浦大学、南通大学等高校成功实践了增材建造,减材建造等技术相关的课程与工艺站项目。为顺应当下建筑行业数字化发展的大趋势,支撑高校的长期学科研究与创新实践,我们基于RobimGH的软件平台,集成了如3D打印,机械臂铣削等智能加工工艺,更进行了跨学科的技术融合与应用探索,整合了如机器视觉,人机交互,虚拟现实等跨行业新兴技术,以巩固人工智能时代下不断拓展的学科边界。基于RobimGH算法库与长期积累的材料知识库,我们已针对塑料,陶土,混凝土,金属等不同材料开发了对应的软件工艺包,以丰富的参数接口与仿真模拟帮助使用者快速运用机械臂3D打印技术,可在家具用品、艺术展览、城市小品、建筑工程、汽车制造、航空航天等领域广泛的应用。立足于多个实际项目的模具加工经验,RobimGH包含多种材料的减材工艺技术,如泡沫、木材、塑性复合材料等。通过融合切割、打孔、开槽、铣削等工艺,能够驱动机械臂高效,精准地完成各种常规工艺,并实现不同工艺流程之间的无缝衔接;更能结合视觉扫描与点云算法,完成复杂形体的高精度铣削。碳纤维丝作为一种高性能的新材料,其比重仅有钢的 1/4 却具有极高的结构抗拉性。一般工业上使用的碳纤维复合材料兼具了碳纤维的抗拉性能与树脂的抗压性能。借助大范围的材料试验总结出的最佳复合材料配比,RobimGH的碳纤维编制算法能够运用这一创新技术完成家具、城市小品、建筑物等不同尺度的建造。基于动作捕捉相机与RobimGH中的动捕解析算法,动捕人机交互技术可以实现人类动作轨迹的精确录制与模拟,可复现人体连贯且微妙的动作序列,完成如书法,调酒等原本只能人手完成的工作;也可针对人体动作或行为做出实时反应,实现类似于“人机共舞”的新颖交互行为。大界在2020年便已推出在建筑机器人行业具有领先水平的机器人适配产品-智能移动底盘,并最终在实践中借助RobimGH的先进算法进化成具有人机共融、智能感知、自主决策能力的复合型移动机器人。立足于建筑行业实际生产环境,我们借助其将“脑眼手脚”高度集成的技术优势,扩大研究应用场景至焊接、码垛、铺砖等领域。
RobimGH x RoLAP
目前我们在中国的建筑、土木、设计院校的RobimGH用户累计已有数千人,2023年我们对所有代码进行了整理和重构,使得RobimGH的核心代码融入了大界机器人前瞻算法实验室RoLAP的最新科研成果,在机器人的自主与感知上加入了强大的新功能,让机械臂能够快速适应各种复杂环境,实现高效、精准的动作执行。
1. 自主避障
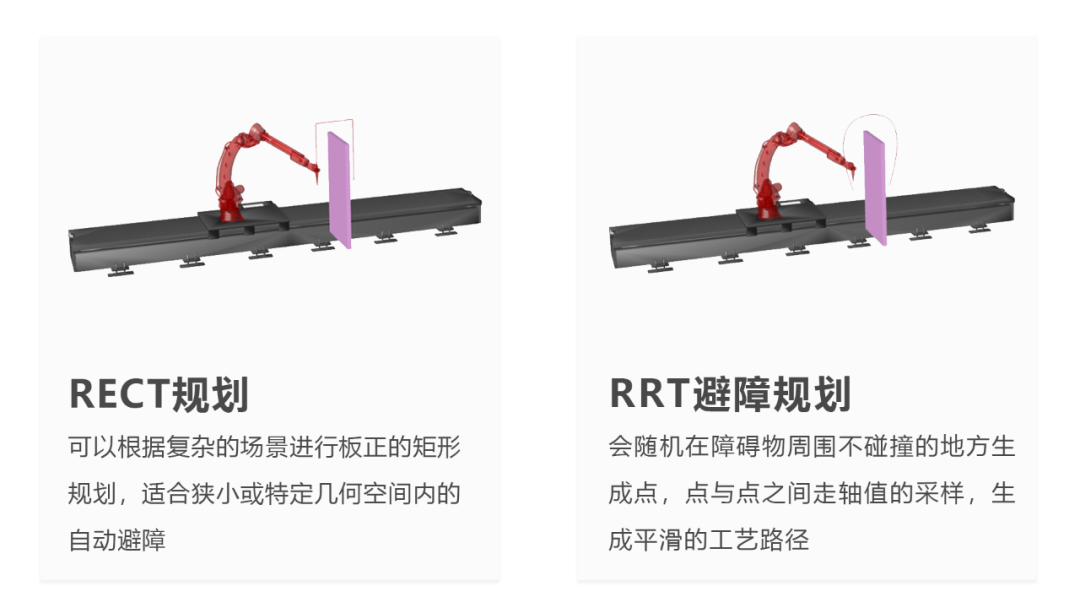
市面上的离线机器人编程软件降低了机械臂操作门槛,但需对每个运动细节定义,导致规划繁琐或难以人工求解。尤其在柔性场景下,避障路径规划是一大挑战。在标准化车间,简单的正逆解工具尚能满足重复动作需求,但在柔性制造和科研场景中,需考虑作业空间内的各种障碍物。传统做法是标定障碍物后手动规划避障路线,效率低下。因此,能自适应障碍物变化的路径自主规划技术,显得尤为重要。借助大界RoLAP自研的的凸包模型与轨迹优化算法,用户便不再需要手动定义若干过渡点,而仅需要在确定障碍物与目标路径的关系之后,一键运算即可生成顺滑的避障路径。RobimGH能够求解出流畅自然,无抖动的避障路径。自动避障算法提供以下两种参数选择。
2. 自主规划
当加工范围过大,需要调动外部轴时,RobimGH能够自主为各个外部轴分配合理的轴值,用户既无需了解外部轴复杂的工作原理,也无需手动对外部轴运动进行设计,只需定义目标点位即可生成连贯,顺滑的外部轴运动方案。同时,RobimGH算法开创性地提供了双外部轴-龙门的自动规划算法,从而能够在单一外部轴的基础之上,完成尺度更大,维度更多的建造项目。
双外部轴龙门自主规划
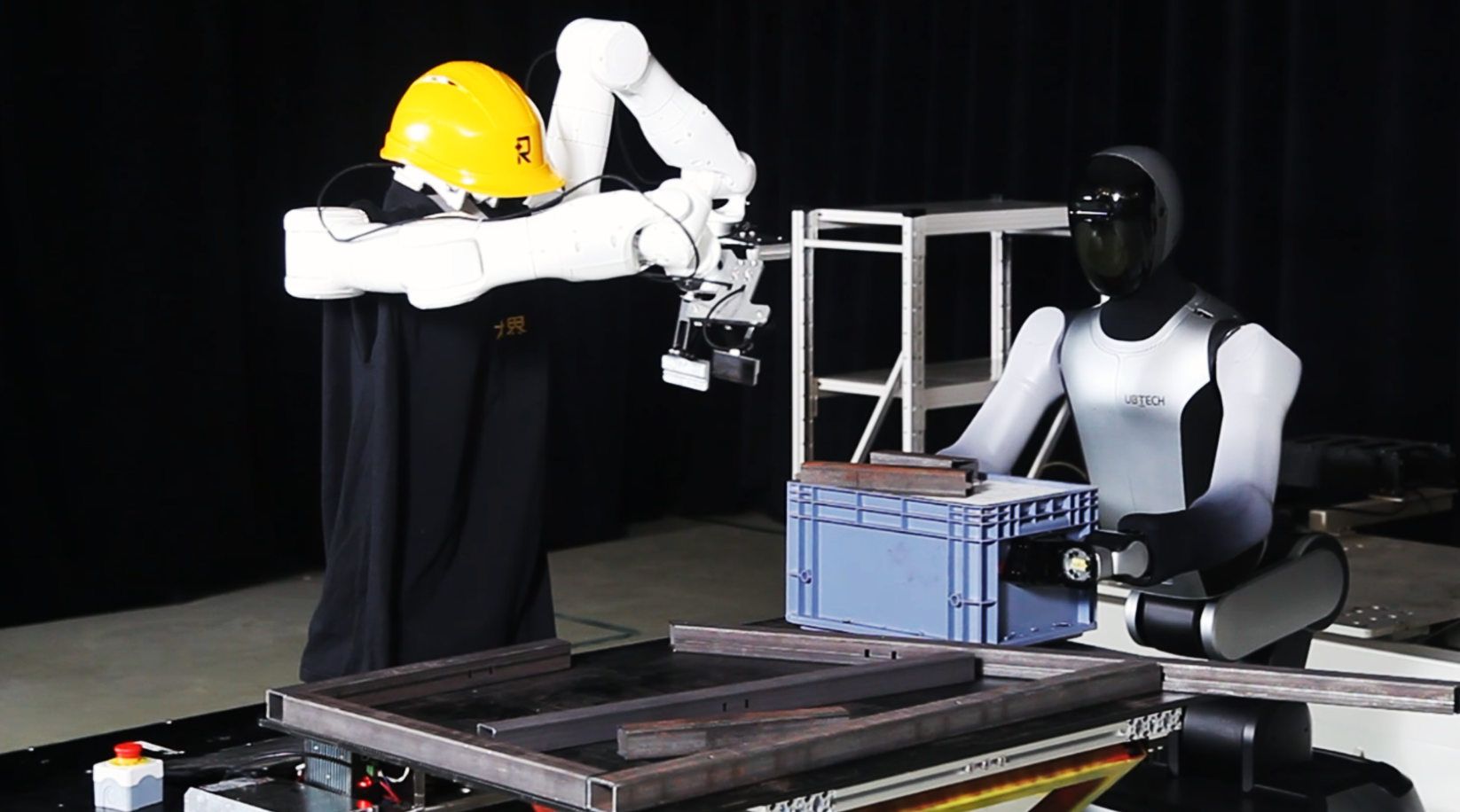
3. 自主感知
利用RoLAP的视觉技术与点云算法,RobimGH能够使机械臂具备感知能力,并根据目标物体状态自主调整运动方式,实现自动抓取。这一技术将运用于同济大学土木工程学院的桁架柔性组装研究课题,并结合机械臂铣削与双机协同技术,为课题提供了适用于装配场景的智能解决方案。
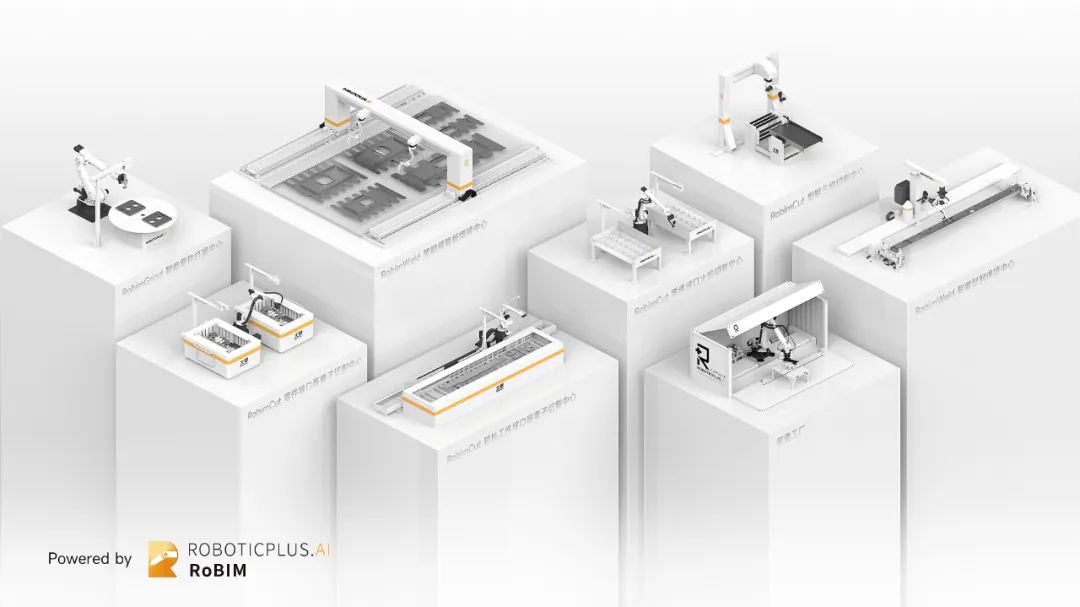
RobimGH X RoBIM
经过5年的自主研发,我们已经从CAD软件的插件RobimGH,打造出自主可控的工业软件平台RoBIM,包括RoBIM Cloud,RobimWeld、RobimCut、RobimGrind、 RobimBend等产品矩阵,从最初的建筑行业走向了工业及制造业的产业化发展与应用,广泛覆盖了建筑、煤机、船舶海工、工程机械、电力等行业,服务了中建科工、上海宝冶、上海建工、郑煤机、中国煤科、江南造船、哈尔滨电机厂等一批行业头部客户,有力地促进数字化的转型与升级。在智能机器人与AIGC快速发展的时代,全球的传统产业都亟需转型与升级。大界利用长期深度扎根行业的实践经历,与不断自主创新的核心技术,通过RoBIM工业软件平台,立志将中国智造带向世界。同时,我们基于RobimGH搭设新平台,并形成“新工科”的产学研培养模式,也希望可以与全球的高校建立交流与合作。期待在RoBIM工业软件与RobimGH学习平台的双循环及相互促进下,大界能够与全球客户一同创造出更加令人兴奋的技术与产品。