在国家十四五政策的引导下,全国各高校逐步开设智能建造专业,而近年来大界积极参与建设国内高校实验室,为其提供先进的多工艺多材料的实验室软硬件解决方案,并借助我们的产业经验,和高校一起逐渐形成一套面向智能建造新学科的复合型人才培养方案。
智能建造实验室 X 复合型移动机器人
在现有智能实验室建设的基础之上,大界积极回应住建部《关于推动智能建造与建筑工业化协同发展的指导意见》中对于高校科研建设的重要指导意见,以及丁烈云院士对于智能建造专业作为新工科专业的前瞻性要求[1],我们打造了更为系统、集成、开源、柔性的智能实验室设备,助力交叉学科人才的培养,多样的前沿探索,推动行业的智能升级。
近年来,以ETH为代表的前沿建筑机器人实验室为拓展机器人的应用可能性做出了大量尝试,其中最具代表性的成果为复合型移动机器人,这项研究极大地拓展了智能机器人的应用场景。鉴于其或具备进一步推动我国高校学科升级及产业转型的巨大潜力,复合型移动机器人正逐渐进入国内各高校智能实验室的视线。
大界在智能建造领域深耕多年,2020年便已推出在建筑机器人行业具有领先水平的机器人适配产品--智能移动底盘,并最终在实践中进化成具有人机共融、智能感知、自主决策能力的复合型移动机器人。立足于建筑行业实际生产环境,我们希望借助其将“脑眼手脚”高度集成的技术优势,来扩大研究应用场景和实践规模。
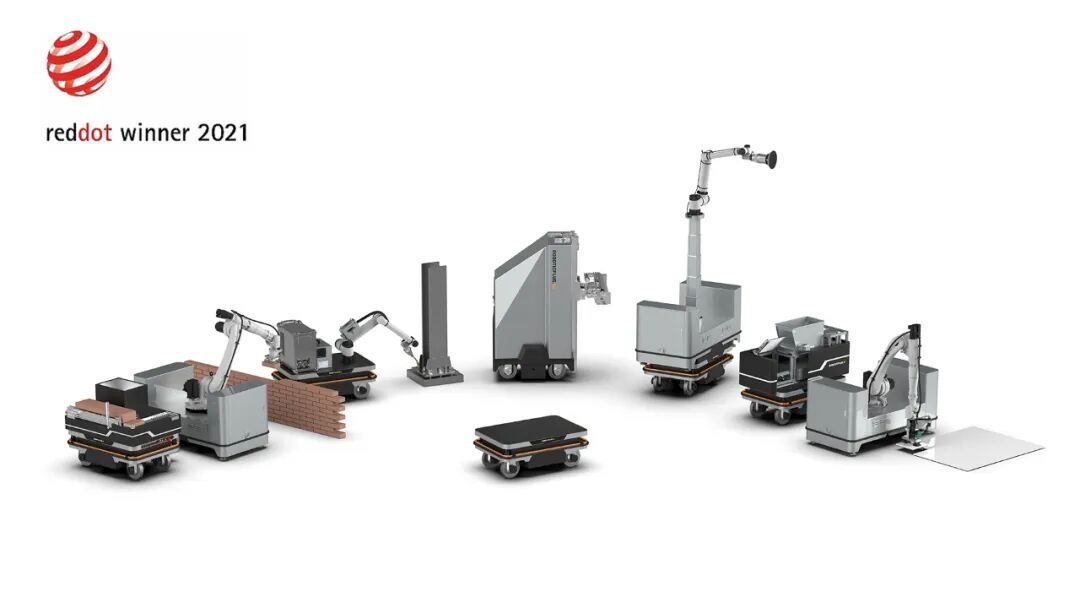
大界复合型移动机器人于2021年获红点奖
核心技术优势
1. 简单易用,学习门槛低
复合型移动机器人搭配大界自研RoBIM软件包,将所有控制与演示功能都集成在Rhino+Grasshopper平台,实现数字孪生,为建筑、土木专业的师生提供无代码编程,极大降低使用门槛和学习成本,让学生将更多精力用在研究内容而非工具使用上。


使用Grasshopper工艺包实时操控
除了Grasshopper平台编程控制外,也可通过手柄轻松遥控底盘运动。手柄遥控底盘
2. 部署便捷,环境自适应
具备自主定位、建图、导航能力,无需场景改造,实现各种环境下的快速部署。导航定位基于ROS系统,实现SLAM同步定位与建图。在未知环境中,由机器人移动确定自身定位并自主完成增量式地图的建立。搭配2D、3D SLAM雷达,稳定输出高质量点云,保证±2cm测距精度,即使在室外高震动、雨雾天气等严酷环境下也能正常运行。
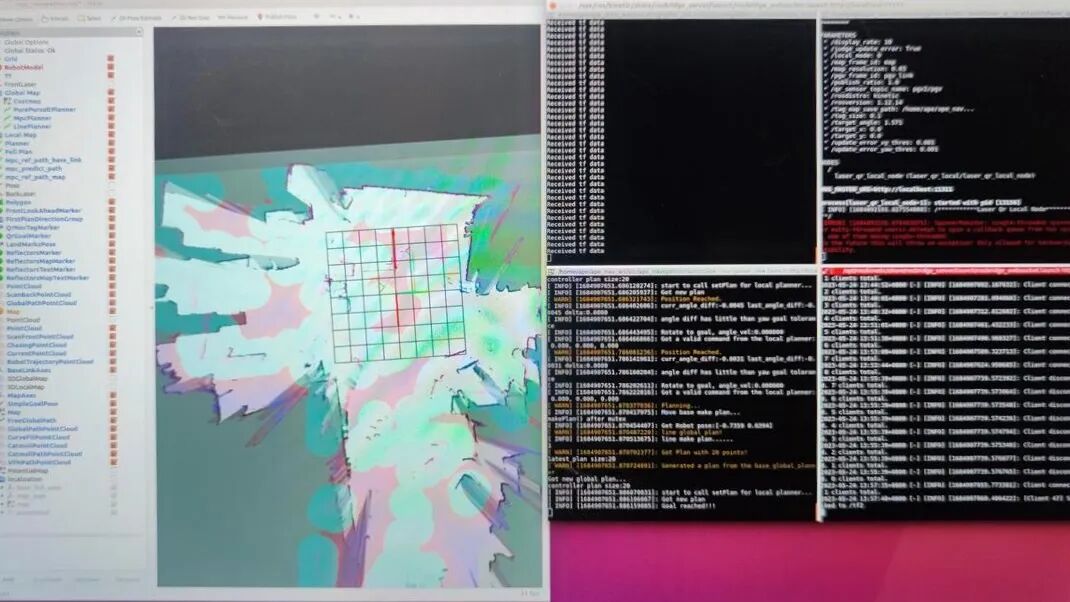
ROS界面
激光雷达数据在GH中的实时显示
操作系统基于开源的ROS平台,采用标准化的开发接口,具有高度可拓展性,可支持目前主流的机械臂和各类工具头、多种传感器协同视觉系统。同时大界提供的软硬件一体化服务,能根据应用场景快速二次开发,大幅缩短开发周期,满足高校不断更新的科研需求。
4. 多重保障,安全无虞
依靠强大的导航定位系统,可实现精准自动避障,提供安全保障。另外,底盘周围安装防撞条,一旦发生碰撞也能触发感应,自动下电。通过拍下车身急停开关和急停遥控器按钮两种方式也可实现手动急停,从而应对突发情况。
底盘智能避障
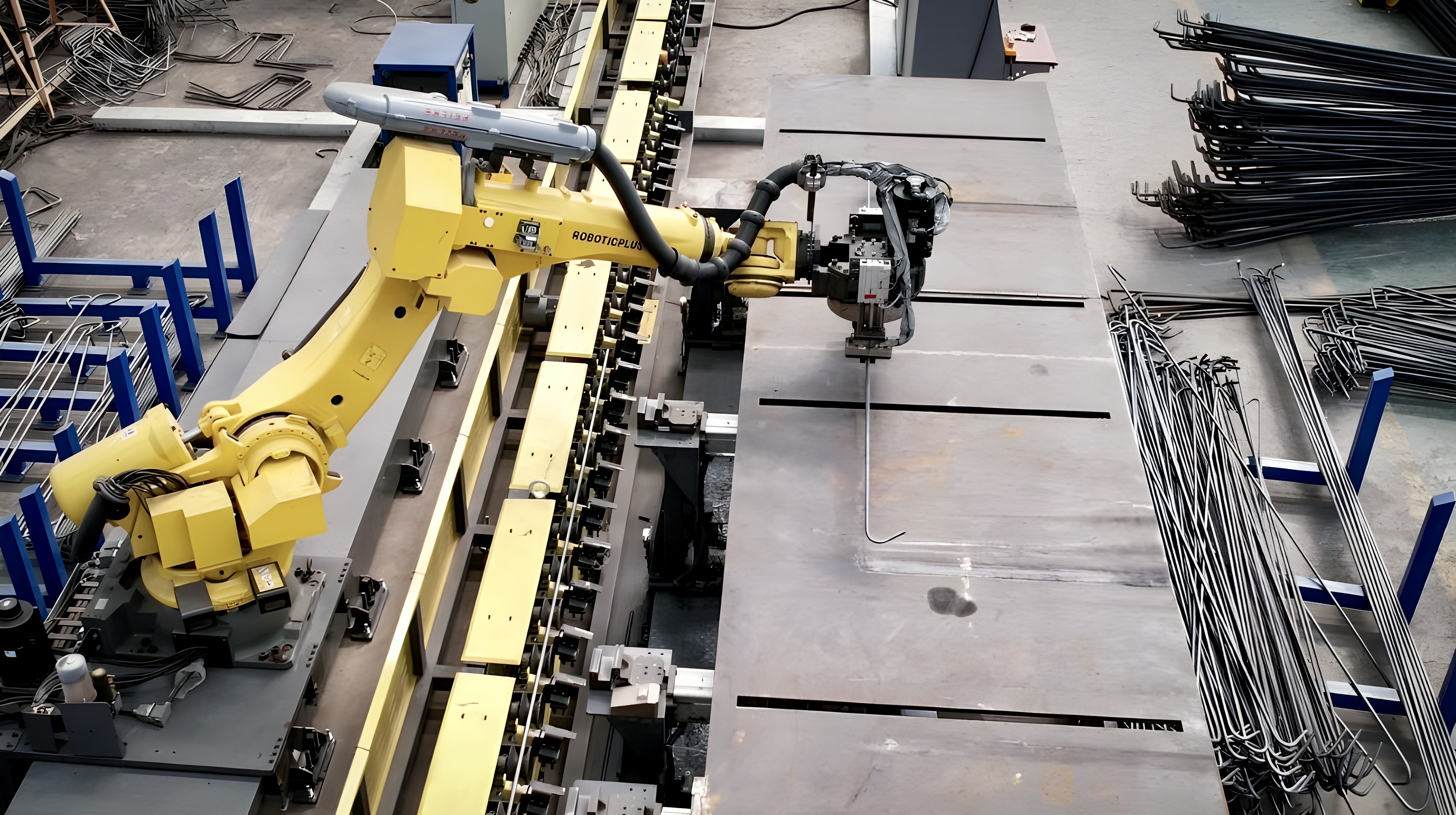
面对新工科建设在数字时代的机遇与挑战,培养大批高水平复合型工程科技人才对于行业转型升级具有重要意义。同时,由于各高校定位和学科优势不同,复合型移动机器人借助其人机共融,多场景应用的优势能够因校制宜地培养学生“掌握算法、驱动设备、解决工程问题”的能力。在复合型移动机器人的基础功能之上,大界拓展了焊接、贴砖、切割、打磨、喷涂等专业化的应用方案,并依托自研的RoBIM云平台,帮助学生掌握机器人设备从智能识别、自主决策到精确施工的操作流程,告别软件繁琐操作,步入一键时代。
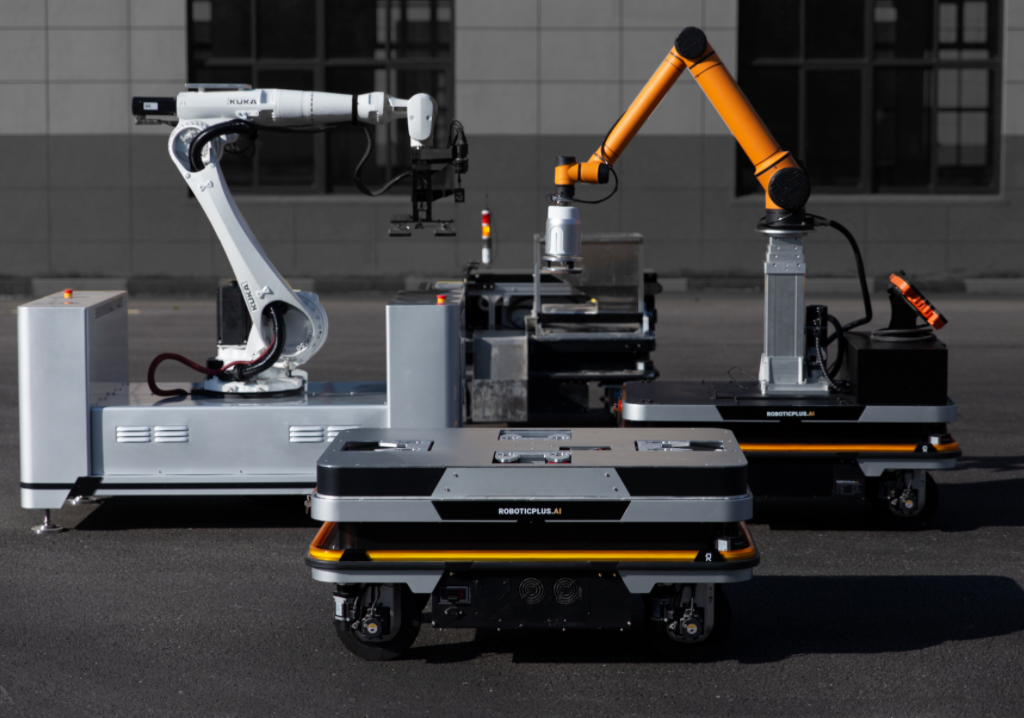
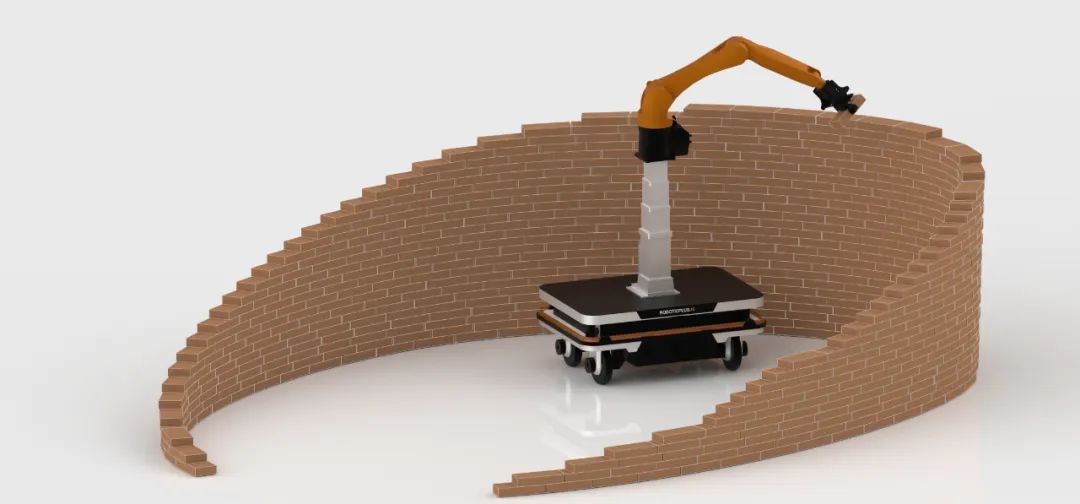
在传统建造技术的语境之下,建筑材料的组装方式往往受到较大的局限,而常见的工业机器人又由于固定的安装方式,难以突破固有的搭建尺度。使用复合型移动机器人,能在机器人已经实现的数字化,定制化的基础之上,完成尺度更大,形式更复杂的搭建,从而帮助建筑土木院校师生在当今高度信息化的时代下,不断探索学科边界。搬运砌筑是目前智能建造领域较为普遍的研究方向,搭载移动底盘的复合机器人便可借助灵活移动的特性完成个性化程度高的复杂搭建任务,并结合立体RGB相机组与计算机视觉算法将误差控制在毫米级。通过替换特定工具头,还可满足多种非常规材料(如不规则木材、石块、泡沫等)的砌筑工作。同时,加装可升降装置可以突破加工高度的限制,为研究新型搭建方式的实践项目提供可能。
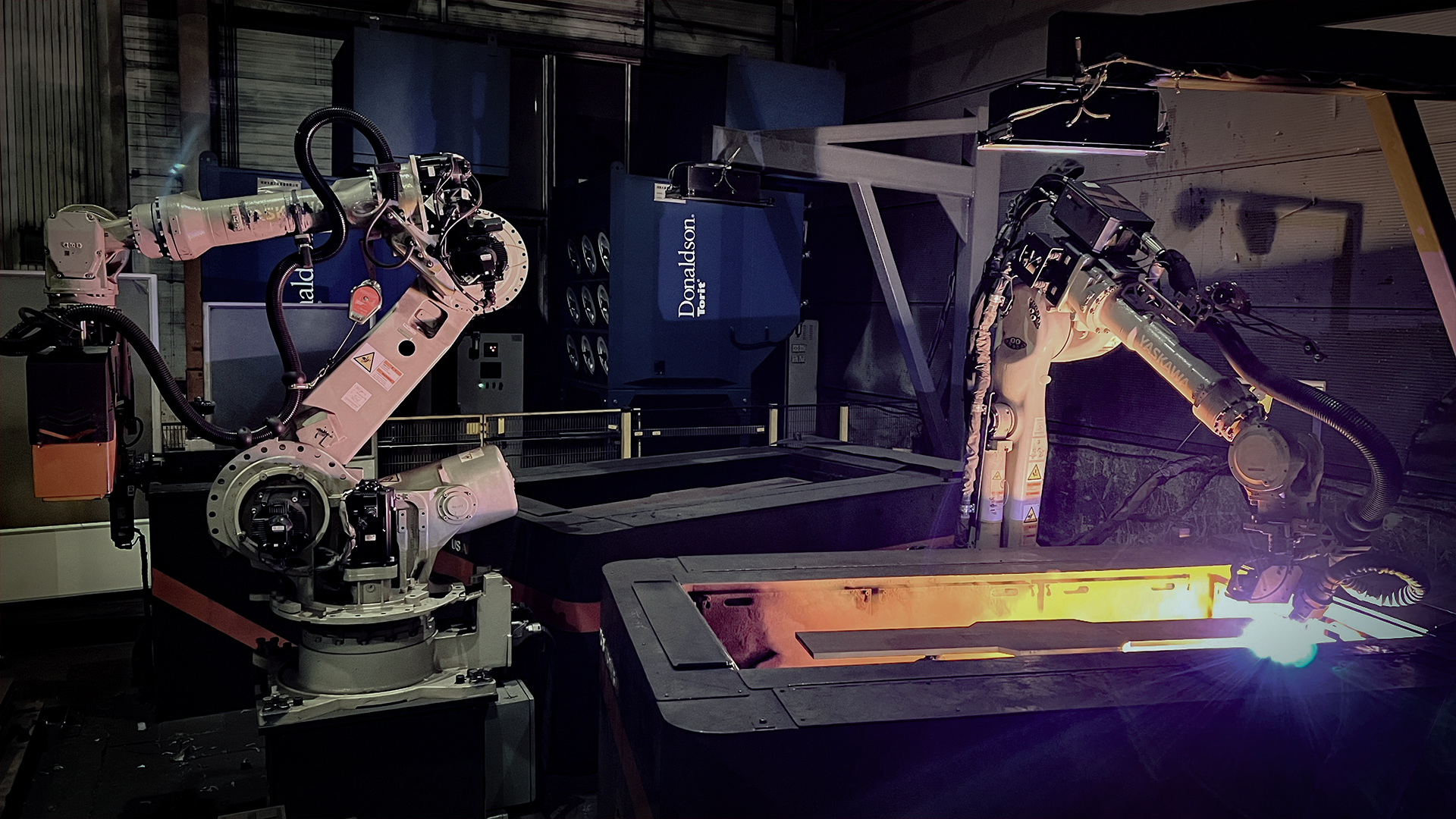
通过控制两台复合型移动机器人进行协同工作,可完成尺度更大、造型更复杂的加工任务,如互承结构的搭建、大尺度的3D打印等,更好地研究双机协同下的自主作业。
高校案例分享
1. 天津大学
天津大学为了实现复杂场景下非常规材料的自动化建造,对数字设计、建造一体化进行深度研究,通过大界复合型移动机器人完成了码垛测试,后续将持续借助其开展数字建造课程,实现室内场地的参数化墙体的自动码垛,并进一步研究更多建造方式。
2. 台湾逢甲大学
台湾逢甲大学为解决目前施工人员高龄化问题,筹建ROSO实验室研究工地自动化施工方案,通过将复合机器人与可升降系统结合,最大限度克服了施工区域的限制,可快速完成面积大且重复性高的任务。经过团队二次开发,目前已经可以应用在工地现场,满足多种施工需求。
[1] 丁烈云. 智能建造创新型工程科技人才培养的思考 [J]. 高等工程教育研究, 2019 (5): 1–4, 29.